Реестры - списки построенных ВС с фотографиями,
описанием их истории и другими подробностями.
Реестры составляются энтузиастами авиации на основании фотографий, расписания, открытых
данных и новостей от операторов и производителей.
Список авиакомпаний, эксплуатирующих ВС
отечественного производства в настоящее время или в прошлом.
Список составляется энтузиастами авиации на основании фотографий, расписания,
открытых данных от операторов и регуляторов ВТ.
МГА - Министерство гражданской авиации СССР, собирательное название - Аэрофлот,
правопреемник - Министерство транспорта РФ.
На этой странице собрана история и структура МГА, а также реестры управлений и отрядов МГА.
Некоторые самолёты и вертолёты после списания устанавливаются в качестве памятников
и в музеях.
В этом разделе на карте отмечены все известные авиапамятники по всему миру!
Маяки России
Шлюзы России
Подробная информация обо всех авиационных музеях и коллекциях, где представлены
отечественные ВС.
Контакты, режим работы, описание, история - и, конечно, фотографии.
Лента обновлений по всем реестрам самолётов и вертолётов.
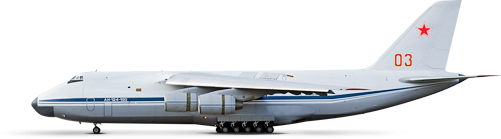
Ан-124 "Руслан" - крупнейший в мире по грузоподъёмности серийный транспортный самолёт.
Предназначен для перевозки до 150 тонн груза на расстояния до 12 тысяч км.
Построено: 55 (1982-2004)
Ан-148, Ан-158 - семейство пассажирских самолётов, предназначенное для перевозки 80-100
пассажиров на расстояния до 4000 км.
Построено: 47 (2004-н.в.)
Бе-200 - реактивный самолёт-амфибия. Предназначен для перевозки до 8 тонн груза или до
12 м3 воды в баках, или до 64 пассажиров на дальность до 3100 км.
Доступен в противопожарном варианте.
Построено: 17 (1998-н.в.)
Ил-96 - семейство широкофюзеляжных дальнемагистральных самолётов, предназначенное для
перевозки до 300 пассажиров или до 92 тонн груза.
Построено: 30 (1988-н.в.)
SSJ-100 - ближнемагистральный пассажирский самолёт, разработанный компанией ГСС
при участии Alenia Aeronautica и Boeing.
Предназначен для перевозки до 98 пассажиров на расстояния до 3000 км.
Построено: 195 (2008-н.в.)
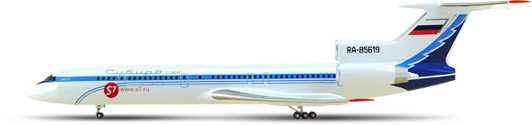
Ту-154 - семейство среднемагистральных самолётов, предназначенное для перевозки 150-180
пассажиров на расстояния до 5000 км.
Самый красивый самолёт в мире!
Построено: 926 (1968-2012)
Ту-204, Ту-214 - семейство средне-дальнемагистральных самолётов, предназначенное для перевозки
160-210 пассажиров на расстояния до 8000 км.
Построено: 86 (1989-н.в.)
Як-42 - среднемагистральный пассажирский самолёт, предназначенный для перевозки 100-120
пассажиров на расстояния до 2500 км.
Построено: 187 (1975-2003)
Добавление новой карточки в реестре, доступно только для редакторов реестра
Контроль карточек по соответствию данных и фотографий
Статистика по перевозкам пассажиров и грузов авиационным транспортом
Действующий государственный реестр гражданской авиации РФ.
Открытые данные Министерства Транспорта РФ.
Действующие сертификаты лётной годности воздушных судов РФ.
Открытые данные Министерства Транспорта РФ.
Авиационные компании - операторы гражданской авиации РФ.
Открытые данные Министерства Транспорта РФ.
Аэропорты - операторы аэродромов гражданской авиации РФ.
Открытые данные Министерства Транспорта РФ.
Сводные данные по выпуску отечественных самолётов и вертолётов разных классов
по данным реестров RussianPlanes.net
Сводные данные по выпуску отечественных судов разных типов
по данным реестров RussianShips.net
Список заводов, на которых строились ВС
Сводная информация по действующим и историческим ресурсам (в циклах, в годах),
назначенным срокам службы и межремонтным интервалам самолётов и вертолётов ГА РФ.
Сводная информация и характеристики отечественных авиационных двигателей.
--Тут запас не нужен банально.Поскольку в половине аэропортов ВС затягивается на стоянку водилом.--
Навскидку по памяти..О функциях носовой стойки...."Управление самолетом при рулении,разбеге,пробеге и демпфировании колебаний колес носовой стойки в режиме свободного ориентирования(при выключенной системе управления)а также для обеспечения установки носовой стойки в нейтральное положение перед ее уборкой." Так что одним водилом не обойтись.
--Тут запас не нужен банально.Поскольку в половине аэропортов ВС затягивается на стоянку водилом.--
Навскидку по памяти..О функциях носовой стойки...."Управление самолетом при рулении,разбеге,пробеге и демпфировании колебаний колес носовой стойки в режиме свободного ориентирования(при выключенной системе управления)а также для обеспечения установки носовой стойки в нейтральное положение перед ее уборкой." Так что одним водилом не обойтись.
1.2. Система управления поворотом колес передней опоры состоит из двух одновременно
работающих систем управления рулежным устройством (двух систем СУС-16),а именно:
системы СУС-16 левого борта (в дальнейшем именуемой I канал) и системы СУС-16
правого борта (в дальнейшем именуемой П канал), имеющих перекрестные связи и
независимые источники гидравлического и электрического питания (рис. 2, 3).
1.3. Электропитание каждой системы СУС-16 (I и П каналов) осуществляется от незави-
симых источников постоянного тока номинальным напряжением 27 В и от незави-
симых источников переменного тока номинальным напряжением 115 В с частотой
400 Гц (рис. 4).
При этом I канал системы управления поворотом колес передней опоры дополнительно
запитывается от аварийных источников электропитания,
1.4. Гидравлическое питание I канала системы управления поворотом колес передней опо-
ры осуществляется от первой гидросистемы основного изделия, а гидравлическое
питание П канала- от третьей гидросистемы основного изделия.
Номинальное давление нагнетания - 210 кгс/сьг (21 МПа).
1.5. Каждая система СУС16 обеспечивает управление:
- в режиме."Взлет-Посадка" по сигналам командных датчиков от педалей управле-
ния рулем направления;
- в режиме "Руление" по сигналам командных датчиков от рулежных рукояток;
-*% режиме "Стабилизация" по аналого--вым сигналам вычислительной системы
управления полетом (ВСУП);
- в режиме "Самоориентирование". При отказе систем СУС16 обеспечивается
перемещение колес передней опоры от внешней нагрузки.
1.2. Система управления поворотом колес передней опоры состоит из двух одновременно
работающих систем управления рулежным устройством (двух систем СУС-16),а именно:
системы СУС-16 левого борта (в дальнейшем именуемой I канал) и системы СУС-16
правого борта (в дальнейшем именуемой П канал), имеющих перекрестные связи и
независимые источники гидравлического и электрического питания (рис. 2, 3).
1.3. Электропитание каждой системы СУС-16 (I и П каналов) осуществляется от незави-
симых источников постоянного тока номинальным напряжением 27 В и от незави-
симых источников переменного тока номинальным напряжением 115 В с частотой
400 Гц (рис. 4).
При этом I канал системы управления поворотом колес передней опоры дополнительно
запитывается от аварийных источников электропитания,
1.4. Гидравлическое питание I канала системы управления поворотом колес передней опо-
ры осуществляется от первой гидросистемы основного изделия, а гидравлическое
питание П канала- от третьей гидросистемы основного изделия.
Номинальное давление нагнетания - 210 кгс/сьг (21 МПа).
1.5. Каждая система СУС16 обеспечивает управление:
- в режиме."Взлет-Посадка" по сигналам командных датчиков от педалей управле-
ния рулем направления;
- в режиме "Руление" по сигналам командных датчиков от рулежных рукояток;
-*% режиме "Стабилизация" по аналого--вым сигналам вычислительной системы
управления полетом (ВСУП);
- в режиме "Самоориентирование". При отказе систем СУС16 обеспечивается
перемещение колес передней опоры от внешней нагрузки.
В процессе уборки передней опоры колеса автоматически устанавливаются в нейтральное поло-
жение кулачковым механизмом, находящимся в амортизаторе, и затормаживаются.
В процессе уборки передней опоры колеса автоматически устанавливаются в нейтральное поло-
жение кулачковым механизмом, находящимся в амортизаторе, и затормаживаются.
Ну это я тоже в нете читал.
У Туполевских машин традиционно 3 гидросистемы.Я свое мнение по аналогии с Ил-76 озвучил.Вопрос был о необходимости резервирования и о том,что на Ту стоит 4 гидроцилиндра,а на Ил-2. Вот и возник вопрос-зачем?
Ну это я тоже в нете читал.
У Туполевских машин традиционно 3 гидросистемы.Я свое мнение по аналогии с Ил-76 озвучил.Вопрос был о необходимости резервирования и о том,что на Ту стоит 4 гидроцилиндра,а на Ил-2. Вот и возник вопрос-зачем?
Это с РТЭ.
Аэрбас-320Ф посадили управление только на одну зелёную ГС, считают, что им этого хватает. На 154-ом использовали 2-ую ГС, но там действительно много проблем было: сам РДЦ не сильно надёжный агрегат, обратная связь частенько ломалась, с ориентиром случались беды.
Это с РТЭ.
Аэрбас-320Ф посадили управление только на одну зелёную ГС, считают, что им этого хватает. На 154-ом использовали 2-ую ГС, но там действительно много проблем было: сам РДЦ не сильно надёжный агрегат, обратная связь частенько ломалась, с ориентиром случались беды.
Ту-154 знаю не очень.Лень вспоминать.Помню что там три ГС.А в Ту-204 тоже три(при 2-х двигателях) третья за счет выдвижного возд.генератора.
Фото Ту-154 панель ГС. http://i076.radikal.ru/1309/b0/4552df71b03e.jpg
Ту-154 знаю не очень.Лень вспоминать.Помню что там три ГС.А в Ту-204 тоже три(при 2-х двигателях) третья за счет выдвижного возд.генератора.
Фото Ту-154 панель ГС. http://i076.radikal.ru/1309/b0/4552df71b03e.jpg
Валерий, я про то, что на 154-ом использовали для управления поворотом одну 2-ую ГС.
На 204-ом 2-ая ГС имеет два насоса, по одному на каждом двигателе, а ВД подключён к 1-ой ГС.
Валерий, я про то, что на 154-ом использовали для управления поворотом одну 2-ую ГС.
На 204-ом 2-ая ГС имеет два насоса, по одному на каждом двигателе, а ВД подключён к 1-ой ГС.
kirill.567
Вот и я к чему. На 330-м у нас тоже от одной системы управление. У нас не бомбер и с грунта ему не летать.
Зачем утежелять резервированием...
kirill.567
Вот и я к чему. На 330-м у нас тоже от одной системы управление. У нас не бомбер и с грунта ему не летать.
Зачем утежелять резервированием...
























































{kind=link}